 At USC Viterbi, students under the guidance of assistant professor Daniel Seita have crafted a robot hand that truly gets the human touch. The MOTIF Hand is engineered to do more than just grip; it senses pressure, heat, and motion, much like how you’d intuitively handle everyday items. It’s a solution that speaks directly to anyone who’s ever wished their tools could think a little more like we do.
At USC Viterbi, students under the guidance of assistant professor Daniel Seita have crafted a robot hand that truly gets the human touch. The MOTIF Hand is engineered to do more than just grip; it senses pressure, heat, and motion, much like how you’d intuitively handle everyday items. It’s a solution that speaks directly to anyone who’s ever wished their tools could think a little more like we do.
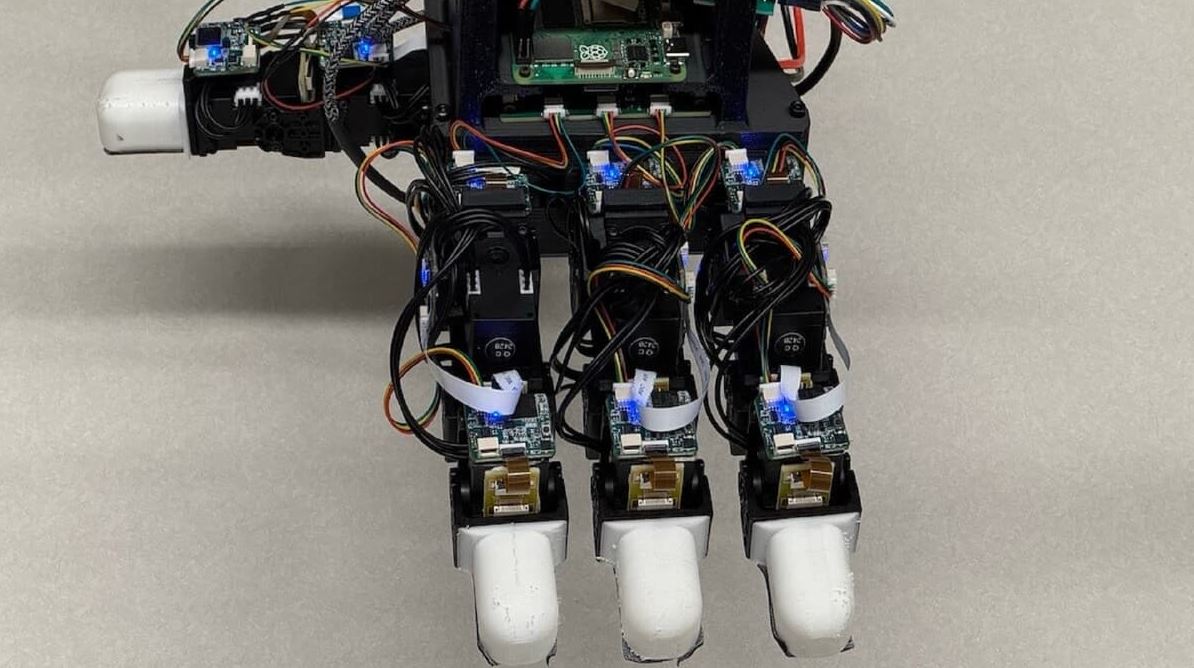
This isn’t your run‐of‑the‑mill robotic gripper. The hand’s multimodal design means it processes several types of sensory data simultaneously. Equipped with a thermal camera in its palm, it can check for heat without a direct touch—just as you might hover your hand near a hot surface. And by giving objects a little shake or flick, it determines just how much force or weight is involved, much like our own natural assessments. Building on the framework of Carnegie Mellon’s LEAP Hand, the team has made the design open-source, opening the door for other innovators to expand on this concept.
If you’ve ever hesitated before touching something unexpectedly hot or uncertain about how much pressure to use, the MOTIF Hand bridges that gap. It’s a thoughtful blend of technology and human intuition, promising smoother, more adaptable interactions in both everyday and specialised tasks