 At MIT’s Computer Science and Artificial Intelligence Laboratory, a fresh vision system is setting a new standard for robotic control. Rather than relying on embedded sensors, this approach enables robots to learn about their own bodies with just a single camera, using what the team calls Neural Jacobian Fields (NJF). In simple terms, NJF teaches robots how to connect control commands with movement solely by watching themselves in action.
At MIT’s Computer Science and Artificial Intelligence Laboratory, a fresh vision system is setting a new standard for robotic control. Rather than relying on embedded sensors, this approach enables robots to learn about their own bodies with just a single camera, using what the team calls Neural Jacobian Fields (NJF). In simple terms, NJF teaches robots how to connect control commands with movement solely by watching themselves in action.
Sizhe Lester Li, the lead researcher and a Ph.D. student at MIT CSAIL, sums it up neatly: ‘This work points to a shift from programming robots to teaching robots.’ This open method sidesteps the need for expensive hardware and overly complex sensor setups, making robotics more adaptable and cost‑effective. Traditional robots, built with stiff structures and loads of sensors, have always been easier to control. But when you try to manage flexible, soft robots, those old rules just don’t cut it. NJF fills that gap by allowing an internal model to be built through observation, broadening the scope for innovative designs.
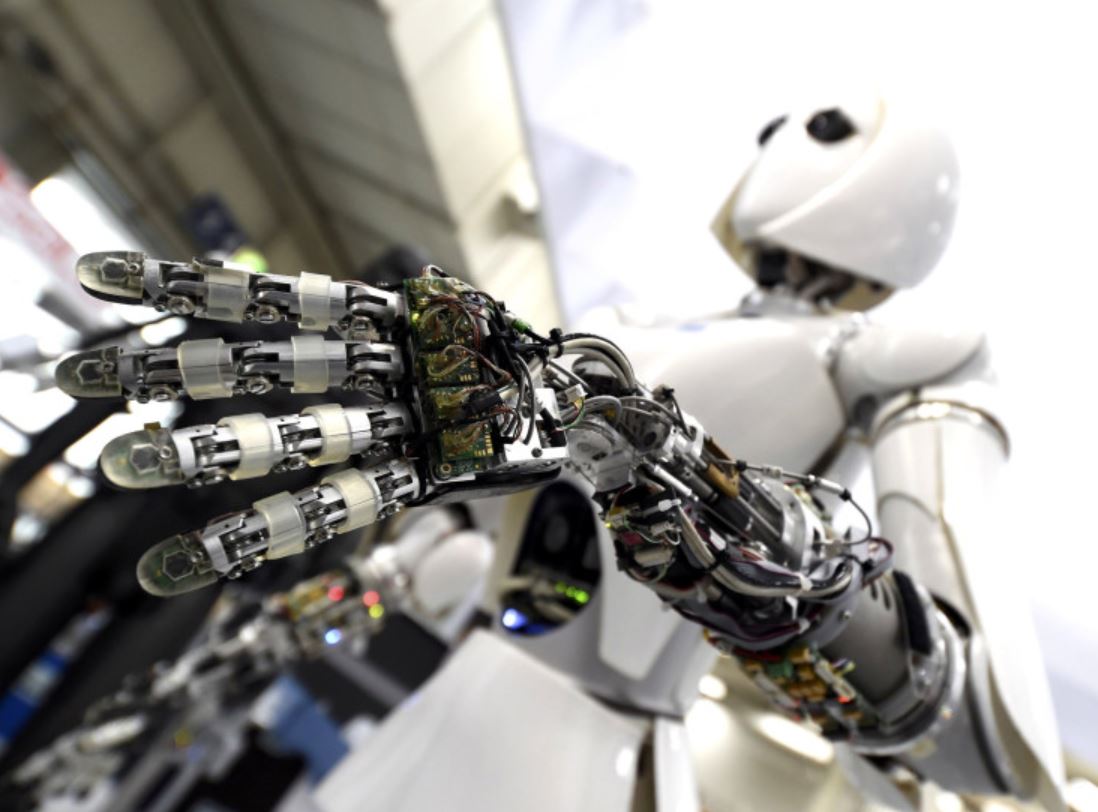
The MIT team put NJF to the test on several different robots—a soft pneumatic hand, the more traditional rigid Allegro hand, and even a 3D‑printed robotic arm. Each robot learned its unique movements by simply engaging in random motions captured through a multi‑camera setup. Once the model was trained, just one standard camera could handle the real‑time control.
Looking ahead, the system holds promise for practical applications too. Imagine robots that can precisely navigate agricultural fields, tackle tasks on busy construction sites without bulky sensor arrays, or adjust dynamically in changing environments. The MIT researchers are pushing the envelope by working to generalise NJF across various robots and hone its performance in contact‑rich settings. The ultimate goal? To create systems that are self-aware through vision alone, shifting the whole mantra from hard‑coded instructions to interactive learning.
This collaborative effort, bridging the gap between computer vision and soft robotics, marks an important stride toward making robots more accessible, affordable and versatile.